[VIP第1年] 指数:3
[VIP第1年] 指数:3
引言计算机辅助设计技术早已应用到镜头的光学设计当中,镜头的结构设计也有一些计算机辅助设计软件,但是由于结构设计的多样性或专业性强或要昂贵平台支持而使用不便。光学镜头的结构设计要求各个光学零件准确定位和合理固定,保证镜头的光学性能。对于照相物镜、显微物镜、望远物镜、目镜等大多数非变焦、光轴成直线的镜头来说,长宁区的光学导航品牌有哪些,其基本结构由透镜、压圈、镜筒、隔圈组成。只要对这些结构作自动设计,就能省去许多费事的构思和繁琐的计算。以自动设计得到基本结构为基础,就不难修改成为所要求的特殊结构,例如镜筒与机壳的连接结构。本文介绍的光学镜头基本结构计算机辅助设计是基于广泛应用的AutoCAD平台和采用人机交互式操作,用AutoLISP语言进行参数化和模块化设计,通用性好且简单易行。二、镜头结构分类常用光学镜头诸如望远物镜、显微物镜、照相物镜和目镜,基本结构包括四个部分:透镜、隔圈、镜筒、压圈。隔圈结构类型比较多,长宁区的光学导航品牌有哪些,它受前后透镜直径和通光孔径的大小差别影响较大,也受其它结构要素影响,长宁区的光学导航品牌有哪些。隔圈结构类型如图1所示。镜筒结构大体可以分为两类:直筒式和台阶式。压圈的结构形式包括外螺纹压圈和内螺纹压圈,在实际应用中大多采用外螺纹压圈。河北光学导航系统费用,可以咨询位姿科技(上海)有限公司;长宁区的光学导航品牌有哪些
500mm以上称超长焦距。120相机的150mm的镜头相当于35mm相机的105mm镜头。由于长焦距的镜头过于笨重,所以有望远镜头的设计,即在镜头后面加一负透镜,把镜头的主平面前移,便可用较短的镜体获得镜体获得长焦距的效果。反射式望远镜头是另一种超望远镜头的设计,利用反射镜面来构成影像,但因设计的关系无法装设光圈,能以快门来调整曝光。微距镜头(marcolens)除作极近距离的微距摄影外,也可远摄。按接口分类C型镜头法兰焦距是安装法兰到入射镜头平行光的汇聚点之间的距离。法兰焦距为。安装罗纹为:直径1in,32牙.in。镜头可以用在长度为(13mm)以内的线阵传感器。但是,由于几何变形和市场角特性,必须鉴别短焦镜头是否合用。如焦距为。如果利用法兰焦距尺寸确定了镜头到列阵的距离,则对于物方放大倍数小于20倍时需增加镜头接圈。接圈加在镜头后面,以增加镜头到像的距离,以为多数镜头的聚焦范围位5-10%。镜头接长距离为焦距/物方放大倍数。U型镜头一种可变焦距的镜头,其法兰焦距为,安装罗纹为M42×1。主要设计作35mm照片应用(如国产和进口的各种135相机镜头),可用于任何长度小于()的列阵。建议不要用短焦距镜头。特殊镜头如显微放大系统。长宁区的光学导航品牌有哪些吉林光学导航系统费用,可以咨询位姿科技(上海)有限公司;
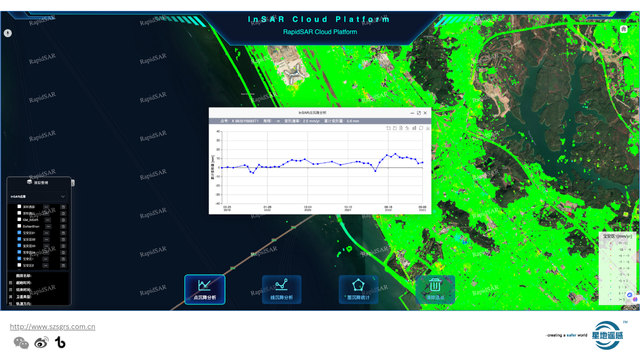
其定位精度约为40米量级。而通过对SAR遥感影像定位误差源的相关文献进行分析,本文借助基于有理多项式模型的无控立体平差模型和SAR遥感影像的时延校正模型,去除SAR遥感影像中存在的定位偏差,实验结果如表3-1和3-2所示。通过对上表结果进行分析可知,经过时延校正和立体平差后,三号SAR立体像对的定位精度可以达到3米左右。基于校正后的三号SAR立体像对和吉林一号多源光学遥感影像,以SAR立体像对中的匹配点作为虚拟控制点,建立多源光学/SAR遥感影像定位精度提升模型,并辅助以差异化权重设计策略,得到经过校正后的多源光学/SAR遥感影像的定位精度,并将该结果与常用的两种联合平差模型和融合校正模型处理前后的结果进行了比较,如表3-3所示。通过对表3-3的定位误差进行分析可知,本文所提出的多源光学/SAR遥感影像定位精度提升模型能够在相同条件下取得更优异的定位结果。同时,图3-2展示了定位精度提升后的光学/SAR遥感影像部分区域的融合结果图,可以看出经过处理后光学/SAR遥感影像之间的相对定位误差可以达到像素级。总结本文针对多源光学/SAR遥感影像定位精度提升问题,以有理多项式模型为基础,通过对光学遥感影像和SAR遥感影像的定位误差源进行分析。
为解决单、双光学浮标无法获得目标全要素信息的问题,文中基于声学目标运动要素解算技术,提出了一种多光学浮标联合定位算法,建立了包含浮标定位误差、观测时间误差和光学观测模糊误差的光学浮标观测数学模型,利用蒙特卡洛仿真方法给出了考虑上述误差并针对机动目标不同数量光学浮标的定位精度指标,同时分析了各因素对多浮标联合定位的影响。文中研究为光学浮标的工程应用提供了数据支撑。引言光学浮标是一种惯性导航、信号采集与处理、电机控制、微电子技术与数字图像识别处理等诸多技术,实现目标识别和监测的复杂设备。近年来,随着电子信息技术的高速发展,光学浮标技术取得了巨大进展并且越来越地应用在领域,可以为无人水下航行器对视界范围内的敌水面舰艇攻击提供有效的目标指示[1]。由于体积限制等因素,单个光学浮标瞬时定位能力较弱,需要依靠定位算法利用信息的时间累计获得满足使用要求的空间定位精度。定位算法有参数估计和状态估计两类,参数估计类算法包括线性小二乘、非线性小二乘、极大似然估计以及辅助变量小二乘等算法;状态估计类算法包括线性卡尔曼滤波、非线性卡尔曼滤波、无迹卡尔曼滤波、容积卡尔曼滤波和粒子滤波等算法。状态估计类算法均属于广义贝叶斯算法。湖北光学导航系统费用,可以咨询位姿科技(上海)有限公司;
镜头是集聚光线,使胶卷能获得清晰影像的结构。早期的镜头都是由单片凸透镜所构成。因为清晰度不佳,又会产生色像差,而渐被改良成复式透镜,即以多片凹凸透镜的组合,来纠正各种像差或色差,并且借着镜头的加膜(coating)处理,增加进光量,减少耀光,使影像的素质的提高。一般而言,摄影用的透镜均为聚焦透镜,依照光学原理、由远处而来的光线穿过具有聚焦作用的透镜后,会全部聚焦于一点,这一点即焦点。而从焦点到镜头的中心点之距离即称焦距。在相机上,镜头的中心点通常都位于光圈处,而焦点位于焦点平面上(即胶卷面)。故相机的焦距为镜头对焦在无限远时,光圈到胶卷间的距离。光学镜头是机器视觉系统中必不可少的部件,直接影响成像质量的优劣,影响算法的实现和效果。光学工业镜头用于反射度极高的物体定位检测,如:金属、玻璃、胶片、晶片等表面的划伤检测,芯片和硅晶片的破损检测,MARK点定位,玻璃割片机、点胶机、SMT检测、贴版机等工业精密对位、定位、零件确认、尺寸测量、工业显微等CCD视觉对位、测量装置等领域。为大家分享一下关于光学镜头的三种分类!按结构分类固定光圈定焦镜头简单:镜头只有一个可以手动调整的对焦调整环。辽宁光学导航系统费用,可以咨询位姿科技(上海)有限公司;长宁区的光学导航品牌有哪些
北京光学导航系统费用,可以咨询位姿科技(上海)有限公司;长宁区的光学导航品牌有哪些
直肠超声图像实时增强现实指导机器人辅助腹腔镜直肠手术:概念研究证明目的由于位置较低,低位直肠手术往往需要采取谨慎的措施。手术能否成功,在很大程度上取决于外科医生确定直肠清晰远端边缘的能力。这对于使用机器人辅助腹腔镜手术的外科医师来说是一个挑战,因为通常隐藏在直肠中,且机器人外科手术器械不能为组织诊断提供实时的触觉反馈。本文介绍了机器人辅助直肠手术基于术中超声的增强现实手术指导框架的开发和评估。方法框架的实现包括校准经直肠超声(TRUS)和内窥镜摄像头(手眼校准),生成虚拟模型,通过光学定位导航系统/光学追踪,将其记录在内窥镜图像上,并将增强视图在头戴式显示器上显示。实验验证设置旨在评估该框架。结果评估过程产生的TRUS校准平均误差为,内窥镜相机手眼校准的比较大误差为,整个框架比较大RMS误差为。在直肠影像的实验中,我们的框架将指导外科医生准确定位模拟和远端切除切缘。结论该框架是根据实际临床情况与Atracsys的临床合作伙伴共同开发的。实验方案和较高的精度展示了在手术流程中无缝集成此框架的可行性。长宁区的光学导航品牌有哪些
位姿科技(上海)有限公司是一家业务所属领域:手术导航、手术机器人研发、医疗机器人研发、虚拟仿真、虚拟现实、三维测量等科研方向 重点销售区域:北京、上海、杭州、苏州、南京、深圳、985高校、211高校集中地 业务模式:进口欧洲精密仪器、销往全国科研机构或科研公司(TO B模式) 我们的潜在用户都是科研用户(医疗机器人研究方向、虚拟仿真研究方向),具体包括:985高校、中科院各大研究所、三甲医院中的科研部门、手术机器人研发公司(包含大型及创业型公司)、211高校、航空航天集团、飞机汽车等制造业研发部门、机器人测量、医疗器械检测所等。的公司,是一家集研发、设计、生产和销售为一体的专业化公司。位姿科技深耕行业多年,始终以客户的需求为向导,为客户提供***的光学定位,光学导航,双目红外光学,光学追踪。位姿科技始终以本分踏实的精神和必胜的信念,影响并带动团队取得成功。位姿科技始终关注数码、电脑市场,以敏锐的市场洞察力,实现与客户的成长共赢。
文章来源地址: http://yiqiyibiao.huagongjgsb.chanpin818.com/gxyq/qtgxyq/deta_10651700.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。